前回Ender-3 S1にKlipper導入しましたが、加速度センサーを購入したのでそちらについて書きます。
詳しく解説しているサイトがあったので今回は補足がメインになります。
参考サイト
こちらのサイトを参考に作業、間違えやすい部分のみ補足します。
ラズベリーパイではないけど分かりやすかったサイト

本元のサイト
必要な機材
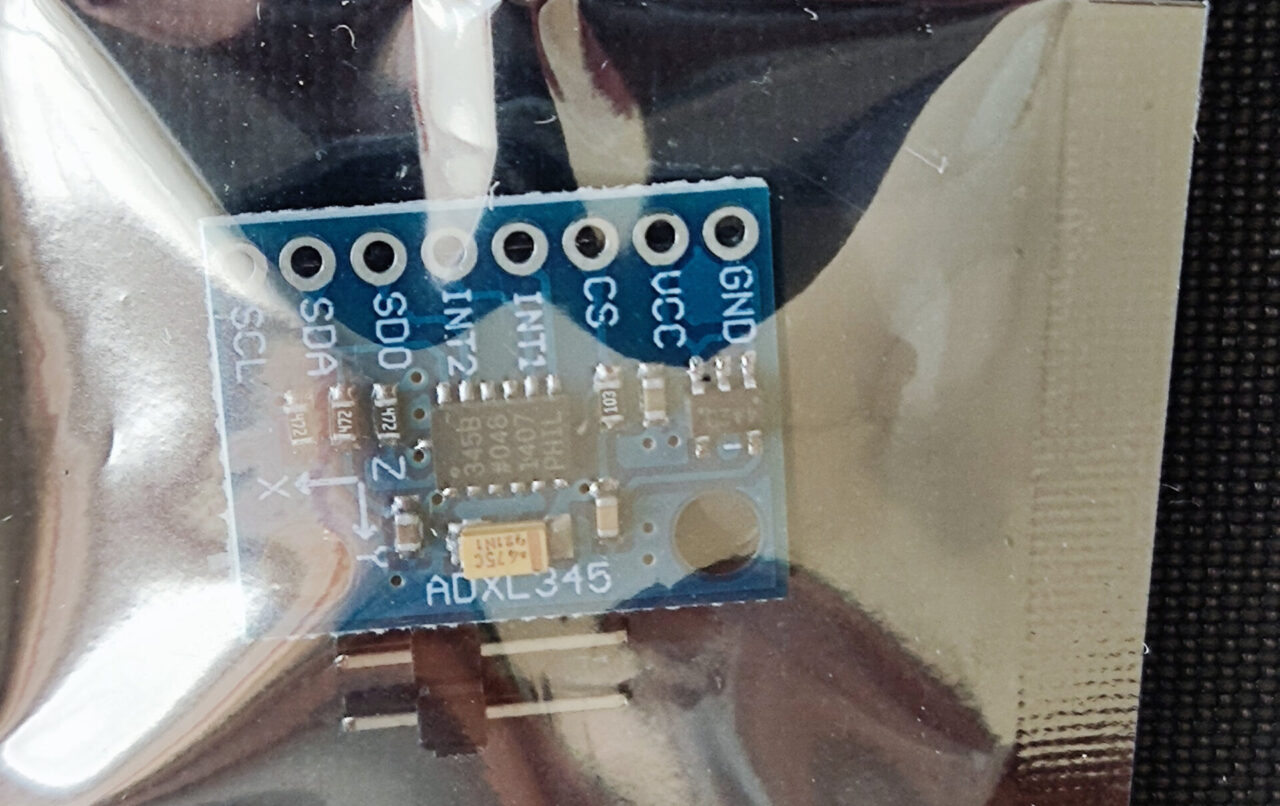
加速度センサー
「ADXL345」のみ使用可能、SPIに対応したものじゃないと通信速度などの関係で使用できないので購入時に注意。
XとYを測定しますが、同じものを位置を変えて測定するので1個あれば大丈夫です。
ピン部分が半田付けされていないものがほとんどなので、無ければ半田ごてを準備してください。
ジャンパケーブル
「メスーメス」の物を使用、長さが足りなければ延長して使用。
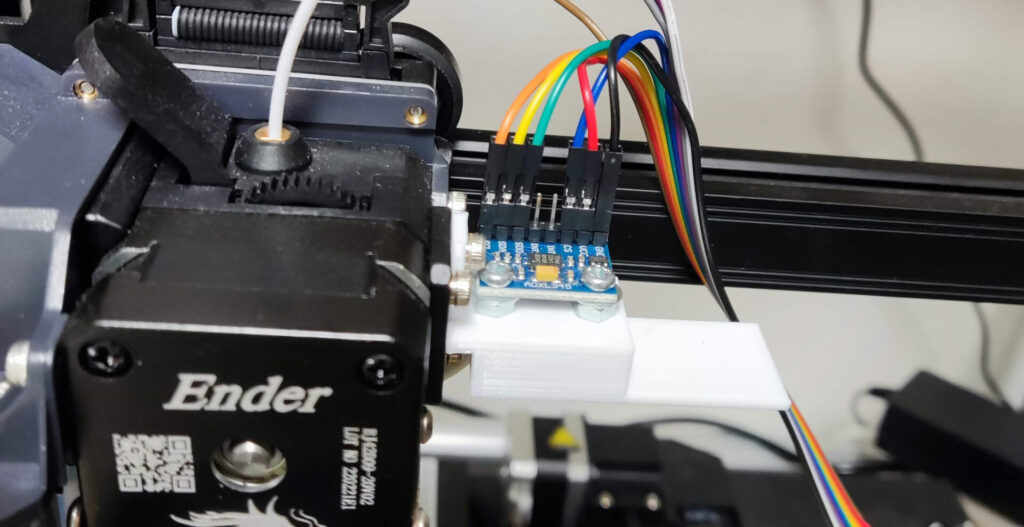
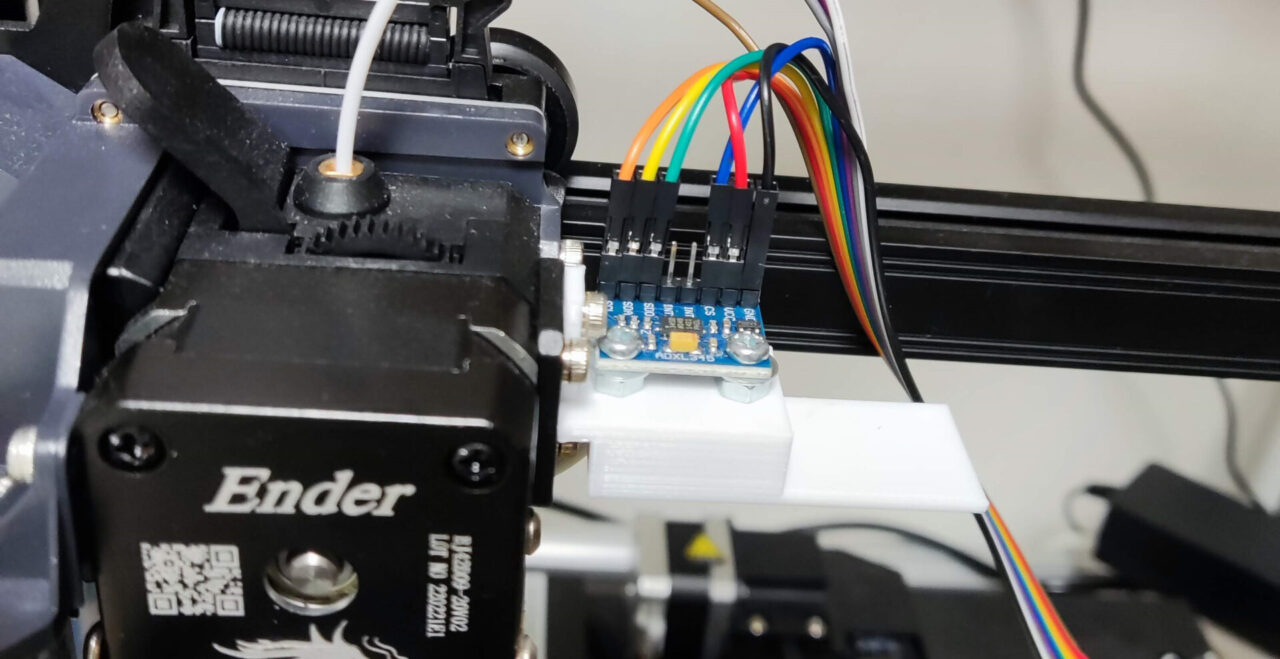
センサーを固定するマウント
使用するプリンターで調べると何かしら出てくると思います。

ファイルが3つあると思いますが、改良版の1点のみで両方ともできるため以下のファイルのみで可能。
エクストルーダーのネジを使用して固定するので、基盤とマウントを固定するM3ネジが2本必要になります。
※あまりガタツキが出るようならワッシャーなどを使用する。
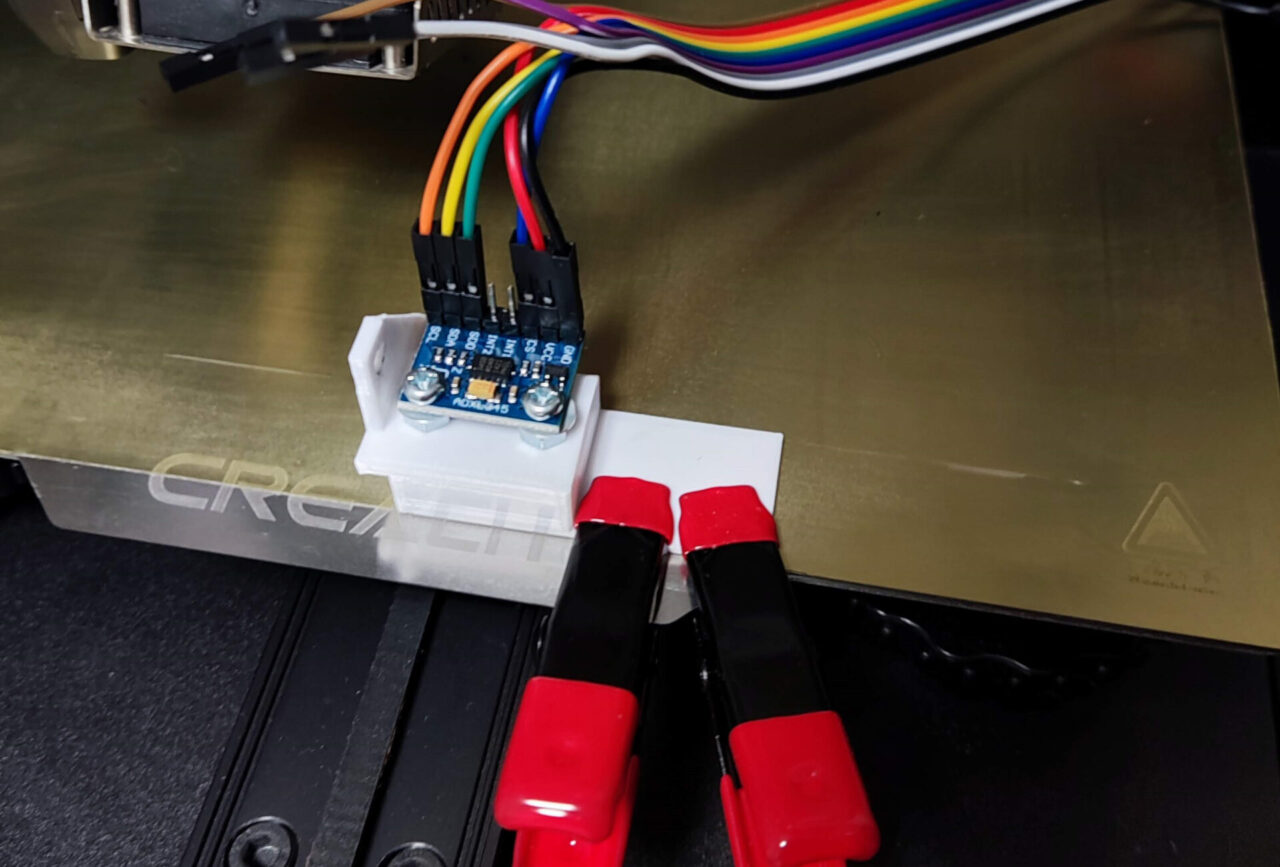
Ender_3_S1_ADXL345_adapter_no_insert.stlヒートベット部分の測定時に固定する必要があるので、クリップなどを用意。
作業時に分かりにくい部分と補足
接続ピン
製品によって「GND」の順番が違う物があるので注意。
「3V3」と「VCC」は同じ接続場所。
スワップの拡張
解説の先頭にあるスワップ拡張ですが、ラズベリーパイ3Bや4を使用している場合で、最新のMainsailOSを使用している環境ではスワップ拡張しなくても問題ないので不要です。
numpyのインストール箇所までスキップ。
コンフィグ
printer.cfgの書き換えがほとんどですが、MCUの箇所は[mcu]と[mcu rpi]は別物なので注意。

共振測定時の注意ヵ所
測定時に指定した箇所で、高速で振動するため机やラックなどに転倒したりするものを置いていると危険なのであらかじめ撤去しておきましょう。
結構高速で揺れます。
測定後について
X軸とY軸を測定してからでも結果は出力されるので続けて作業可能。
コンソールではなく、ラズベリーパイにSSHログイン
コマンドを実行する。
~/klipper/scripts/calibrate_shaper.py /tmp/resonances_x_*.csv -o /tmp/shaper_calibrate_x.png
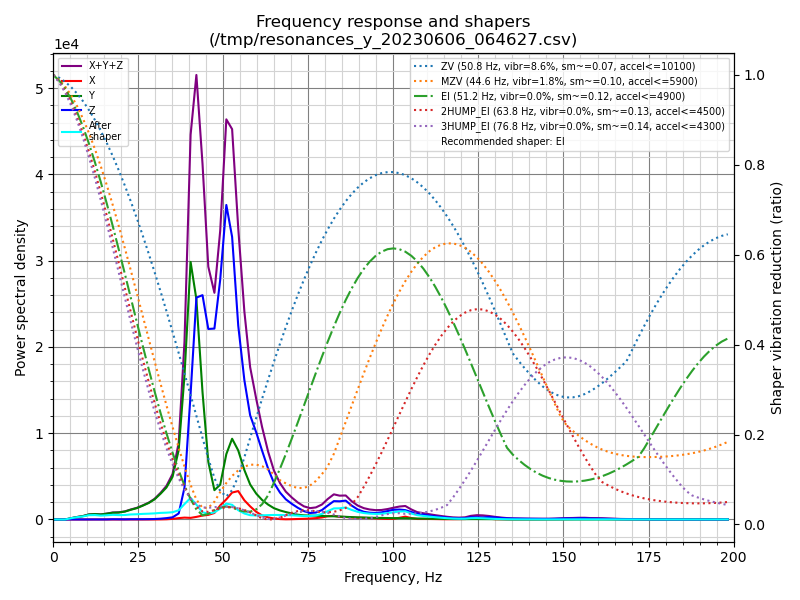
~/klipper/scripts/calibrate_shaper.py /tmp/resonances_y_*.csv -o /tmp/shaper_calibrate_y.png出力データがグラフ画像で出力され各種数値を確認可能。
一時フォルダのtmpにcsvとPNGが出力されるので、FTPソフトを使用してPCに保存しておくと万が一作業中に電源が落ちても同じフォルダに入れなおせば作業可能。
一度電源を切ると一時フォルダのデータは消えるので注意。
/tmp/resonances_x_*.csv
[input_shaper]
shaper_freq_x: 62.0
shaper_type_x: ei
shaper_freq_y: 44.6
shaper_type_y: mzv今回の作業では以上のような結果がグラフで出力され、上記のようなコードになります。
X軸をMZVにするとうまく動作しなかったのでeiの数値を使用、詳しく解説はしませんが他の数値を使用する場合は「type」の部分を該当するものに書き換える。
まとめ
今回は公式サイトなどの情報が多かったので手順を全部は解説しませんでしたが、実際に作業すると不要だった作業やそれに伴う調べ物がいくつかあったのでうまく行かなかった部分をピックアップしました。
最後まで有難うございます。